

L’imaging a onde millimetriche (mmWave) è diventato una parte importante dei sistemi di scansione di sicurezza negli aeroporti, negli edifici pubblici e negli stadi. Gli scanner a onde millimetriche sono superiori ai metal detector tradizionali perché sono in grado di identificare e localizzare minacce sia metalliche che non metalliche. Questo articolo descrive il funzionamento dell’hardware di imaging a onde millimetriche e presenta un chipset che utilizza l’edge processing per gestire carichi di dati imponenti e consentire lo sviluppo di sistemi di scansione di sicurezza di tipo walkthrough.
di Eamon Nash, Applications Engineering Director
Come funziona l’Imaging ad onde millimetriche
La Figura 1 illustra il funzionamento di uno scanner ad onde millimetriche. Il sistema consiste in un array di trasmettitori e ricevitori collegati ad un array di antenne distribuite nello spazio. Il sistema è analogo ad un analizzatore di rete che misura il Return Loss o S11. In qualsiasi momento, un’antenna dell’array trasmette un segnale a bassa potenza a una singola frequenza. Questo segnale si riflette sul bersaglio e genera una retrodiffusione (l’illustrazione mostra la riflessione da un singolo punto del bersaglio, ma in pratica il segnale trasmesso è omnidirezionale, quindi ci saranno riflessioni da più punti).
La fase e l’ampiezza della retrodiffusione vengono misurate da tutte le antenne riceventi dell’array. Per ridurre la perdita diretta dal trasmettitore al ricevitore, la polarizzazione può essere utilizzata tra le antenne di trasmissione e ricezione. Una volta completata la misura, lo stesso segnale viene trasmesso da un’altra antenna (operante alla stessa frequenza) e il processo di misura viene ripetuto.
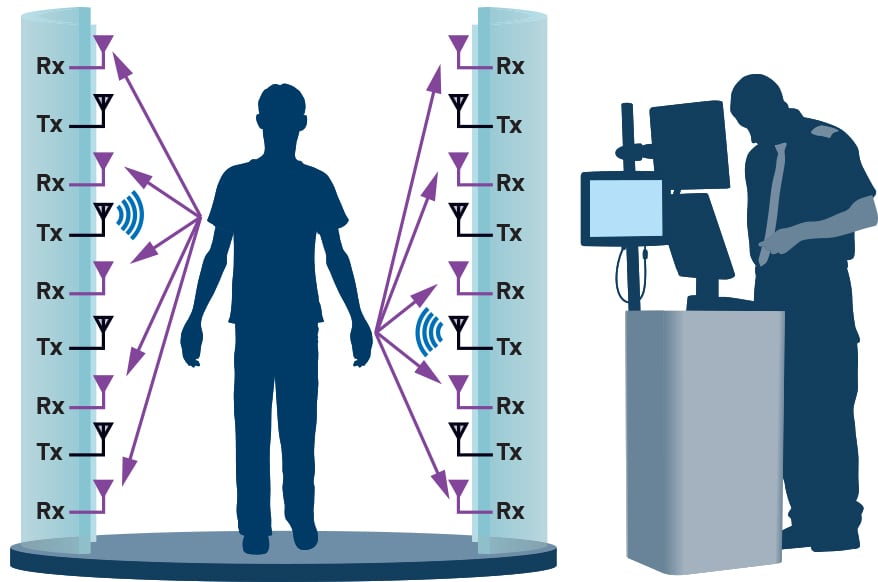
Figura 1. Funzionamento di un sistema di imaging di sicurezza a onde millimetriche.
Poiché la profondità di penetrazione dei segnali RF e la natura della riflessione variano con la frequenza, la scansione descritta in precedenza viene generalmente ripetuta su più frequenze, su una banda ampia. La matrice di vettori risultante forma un array multidimensionale (rispetto alla frequenza e alla posizione nello spazio) che viene utilizzato per creare un’immagine in grado di identificare oggetti metallici e non metallici nascosti tra e sotto gli strati di abbigliamento.
L’hardware necessario per completare una scansione di questo tipo deve essere multicanale e avere un’ampia gamma di frequenze operative. La gamma di frequenze da 10 GHz a 40 GHz è sufficientemente estesa per differenziare gli oggetti in un tipico scenario di scansione di sicurezza (indumenti, zaini, armi ed esplosivi). I sistemi con un numero maggiore di canali tendono ad avere una risoluzione più elevata, che consente di identificare anche oggetti di piccole dimensioni. Ad esempio, mentre il rilevamento di una lama di rasoio è fondamentale negli scanner aeroportuali, la sicurezza di edifici pubblici e stadi si concentra maggiormente sul rilevamento di oggetti più grandi, come armi o esplosivi. In queste applicazioni si utilizza in genere un numero di canali inferiore.
Un altro componente critico di questi sistemi è uno switching time veloce. Ciò consente di realizzare sistemi di scansione in cui la persona sottoposta a verifica deve rimanere in posa solo per un breve periodo di tempo (tipicamente un secondo o meno). I sistemi walkthrough di nuova generazione richiedono tempi di commutazione più rapidi, in modo che il soggetto non debba fermarsi e mettersi in posa.
La Figura 2 mostra come un chipset di imaging mmWave di Analog Devices possa essere utilizzato per implementare uno scanner ad onde millimetriche completo. Un array di trasmettitori (ADAR2001) è pilotato da un’agile sorgente di frequenza centrale. Un array di ricevitori (ADAR2004) rileva i segnali riflessi e li riconverte a una bassa frequenza intermedia (IF), alla quale vengono campionati in IF da un convertitore sigma-delta a tempo continuo (Continuous Time Sigma-Delta, CTSD) multicanale (AD9083).
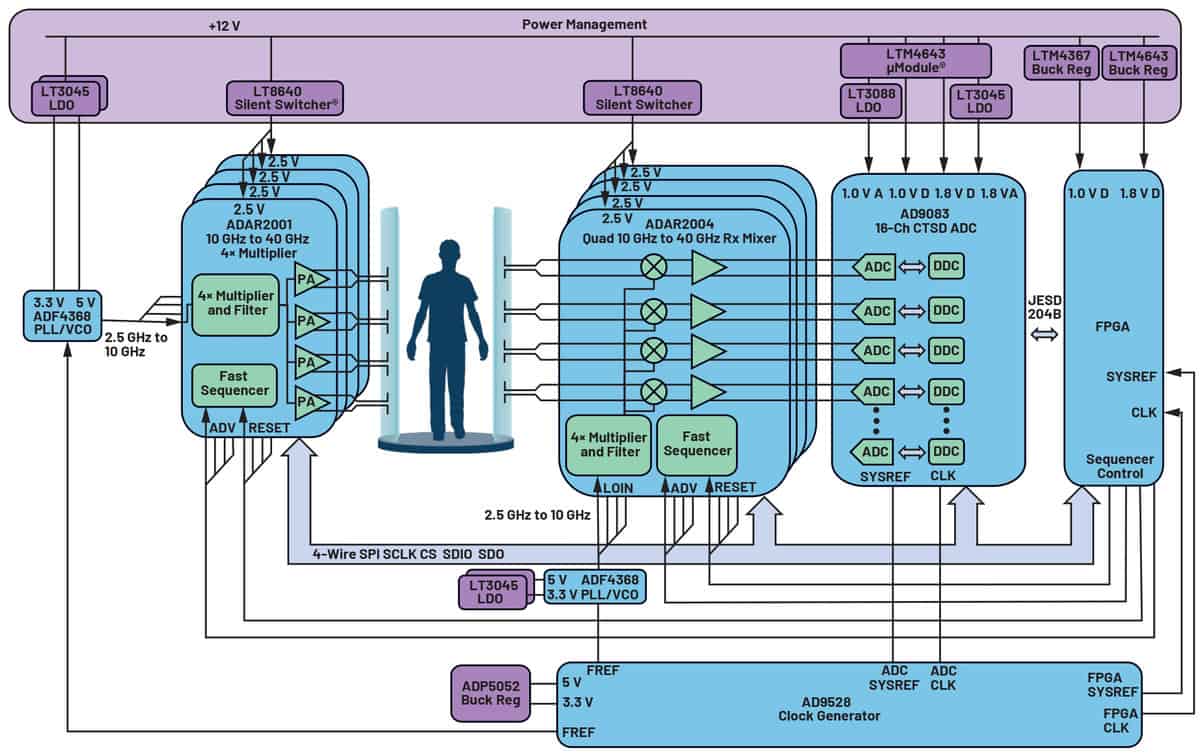 Figura 2. Un sistema completo di imaging a onde millimetriche.
Figura 2. Un sistema completo di imaging a onde millimetriche.
Vediamo ora da vicino questi componenti e come la loro funzionalità ottimizza le prestazioni complessive del sistema.
Transmettitore
Come già evidenziato, il trasmettitore consiste in un ampio numero di canali di antenne distribuite nello spazio, ciascuna pilotata da un amplificatore di potenza. L’ADAR2001 è un trasmettitore a 4 canali che si collega direttamente alle antenne e ha una gamma di frequenze di uscita compresa tra 10 GHz e 40 GHz. A causa delle difficoltà associate alla distribuzione di un segnale da 10 GHz a 40 GHz in un array di grandi dimensioni, l’ADAR2001 incorpora un moltiplicatore 4×. Di conseguenza, tutta la distribuzione del segnale in uscita dal circuito integrato del trasmettitore avviene nell’intervallo di frequenza compreso tra 2,5 GHz e 10 GHz.
Gli elementi RF principali del trasmettitore ADAR2001 sono un buffer di ingresso RF, un moltiplicatore di frequenza 4× con filtri armonici commutabili integrati, uno splitter di segnale 1:4 e quattro amplificatori di potenza con uscita differenziale, destinati a pilotare strutture di antenne differenziali come dipoli o antenne a spirale. La Figura 3 mostra uno schema a blocchi dettagliato dell’ADAR2001.
Alla porta RFIN viene applicato un segnale d’ingresso RF CW compreso tra 2,5 GHz e 10 GHz con un livello di potenza di almeno -20 dBm. Il moltiplicatore di frequenza a banda larga è costituito da tre sottocircuiti in parallelo. Ogni sottocircuito (banda bassa, banda media, banda alta) è ottimizzato per moltiplicare e filtrare un segmento della gamma di frequenza complessiva. Gli switch all’ingresso e all’uscita del blocco moltiplicatore servono a selezionare il sottocircuito per la frequenza di funzionamento desiderata.
Prima di essere suddivisa in quattro parti e applicata a quattro amplificatori di potenza, l’uscita del moltiplicatore passa attraverso un attenuatore programmabile. Oltre al filtraggio configurabile nel blocco moltiplicatore, ogni PA contiene un filtro passa-basso/notch che può essere attivato o disattivato. Per frequenze di uscita fino a 20 GHz, questo filtro deve essere abilitato. Al di sopra dei 20 GHz, deve essere disabilitato.
L’attenuatore programmabile serve a garantire una curva di potenza di uscita relativamente piatta rispetto alla frequenza. Questo attenuatore ha un intervallo di attenuazione digitale di circa 15 dB in step digitali. Man mano che la frequenza di uscita passa da 10 GHz a 40 GHz, l’attenuazione deve essere diminuita per mantenere la piattezza desiderata della curva di potenza di uscita rispetto alla frequenza. Il risultato è una potenza di uscita nominale del PA di +5 dBm su ciascuna delle uscite differenziali del PA con una soppressione delle armoniche che varia da -20 dBc a -30 dBc.
Per eseguire una scansione completa di frequenza da 10 GHz a 40 GHz, le impostazioni del blocco moltiplicatore/filtro devono essere regolate sette volte per garantire la reiezione delle armoniche e la potenza di uscita ottimali. Inoltre, mentre il sistema si sofferma su una frequenza, ogni canale del trasmettitore deve essere attivato e disattivato in successione.
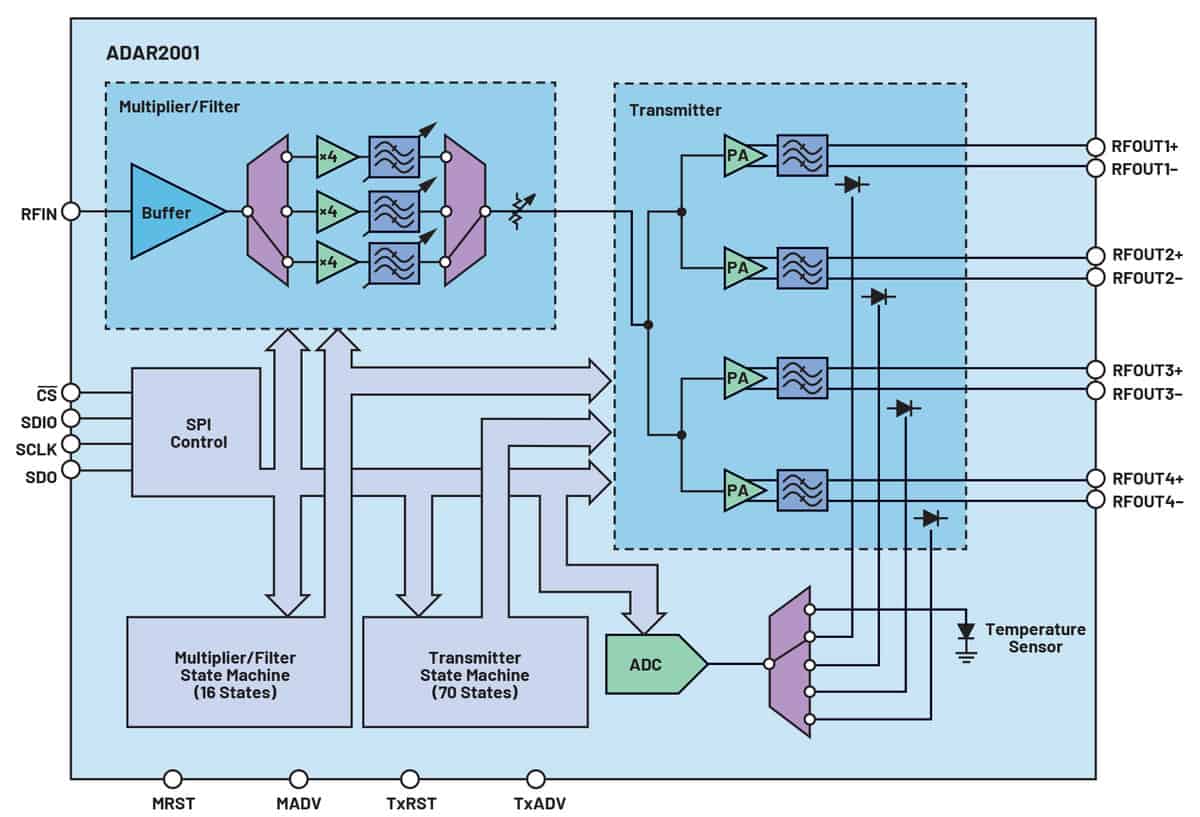 Figura 3. Il trasmettitore ADAR2001 da 10 GHz a 40 GHz.
Figura 3. Il trasmettitore ADAR2001 da 10 GHz a 40 GHz.
Per evitare di creare un collo di bottiglia di comandi SPI, l’ADAR2001 include due macchine a stati che possono essere preprogrammate con un massimo di 70 stati. Una volta programmata la RAM del dispositivo, gli avanzamenti di stato possono essere effettuati con un semplice impulso al pin MADV (advance) del dispositivo. Queste caratteristiche si combinano per garantire un tempo di switching del canale di 2 ns. Questo tempo di commutazione è ottenibile anche quando si passa da un circuito all’altro (ad esempio, il canale 4 del dispositivo A si spegne mentre il canale 1 del dispositivo B si accende). Poiché una scansione completa comporta uno sweep dell’intero canale a più frequenze, il tempo di commutazione è fondamentale. Ad esempio, se l’array ha 500 elementi e deve eseguire uno sweep da 10 GHz a 40 GHz con incrementi di 50 MHz, deve eseguire un totale di 300.000 commutazioni di canale per completare una scansione completa.
La potenza di uscita RF di ciascun canale può essere monitorata mediante singoli rilevatori RF on-chip. Anche la temperatura del die può essere monitorata da un sensore di temperatura on-chip. Questi sensori alimentano un multiplexer analogico 5:1, che passa il segnale desiderato a un ADC a 8 bit integrato.
Il PLL/VCO ADF4368 fornisce lo stimolo alla rete del trasmettitore. Il suo segnale di uscita viene suddiviso più volte a seconda del numero di canali di trasmissione. La potenza di uscita relativamente elevata dell’ADF4368 (+9 dBm) e la soglia di ingresso minima dell’ADAR2001 (-20 dBm) fanno sì che l’uscita dell’ADF4368 possa essere ripartita passivamente molte volte prima che sia necessario il buffering dell’amplificatore.
Ricevitore
Le riflessioni della trasmissione vengono catturate dai ricevitori, che sono un array di mixer multicanale e ADC. L’ADAR2004 è un mixer quadruplo e un driver ADC con un amplificatore di guadagno programmato digitalmente (Digitally programmed Gain Amplifier, DGA). L’ingresso LO, che ha anche un moltiplicatore interno 4×, è pilotato da un secondo PLL la cui frequenza di uscita è sfasata rispetto alla frequenza radio in modo che il mixer produca un’uscita IF reale. Le uscite IF dei mixer vengono poi campionate dall’AD9083, un ADC sigma-delta a tempo-continuo a 16 canali con downconversion digitale integrata. È stata scelta un’architettura di campionamento IF piuttosto che un’architettura zero-IF, per evitare gli offset DC che derivano dalla perdita LO nel ricevitore e gli errori I/Q che derivano da un bilanciamento imperfetto della quadratura nello splitter dell’LO. Sebbene queste imperfezioni possano essere mitigate dalla calibrazione, quest’ultima sarebbe necessaria a ogni frequenza di ingresso, poiché sia le perdite di LO che gli errori di quadratura tendono a variare con la frequenza.
La Figura 4 mostra uno schema a blocchi del mixer quadruplo ADAR2004. L’ingresso LO è pilotato da un’onda sinusoidale da 2,5 GHz a 10 GHz che produce un’onda da 10 GHz a 40 GHz all’uscita del moltiplicatore. L’uscita del moltiplicatore è alimentata dai quattro mixer che hanno un guadagno programmabile sulle loro uscite IF. Come il trasmettitore ADAR2001, anche il ricevitore.
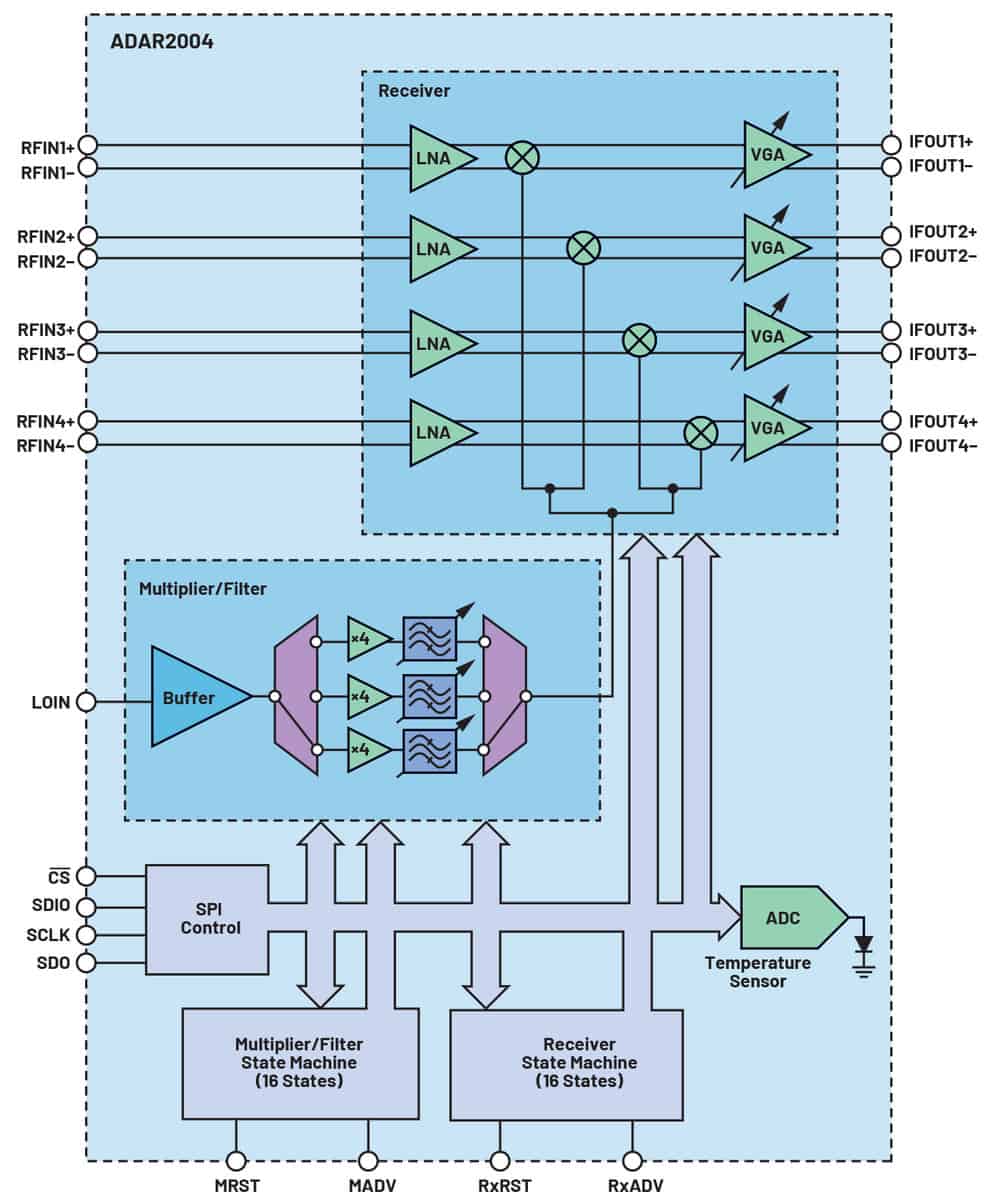
Figura 4. Schema a blocchi del ricevitore ADAR2004 da 10 GHz a 40 GHz
ADAR2004 dispone di due macchine a stati on-chip che possono essere preprogrammate.
ADC Multicanale
La Figura 5 mostra uno schema a blocchi dell’AD9083, un ADC CTSD a 16 canali. Gli ingressi dell’ADC sono progettati per avere la stessa tensione di modo comune delle uscite IF dell’ADAR2004. Ciò consente di collegare direttamente l’uscita del mixer e l’ingresso dell’ADC. L’assenza di condensatori di accoppiamento AC garantisce l’assenza di transienti di carica/scarica quando l’uscita del mixer commuta bruscamente (ad esempio, durante uno step di frequenza all’ingresso del mixer).
L’uso di un’architettura ADC CTSD del primo ordine con un filtro unipolare integrato consente di risparmiare spazio sul PCB, riducendo al minimo il filtraggio esterno. L’architettura consente inoltre un rapido tempo di assestamento del segnale rispetto a quello dei convertitori a frequenza di Nyquist, che richiedono filtri antialiasing altamente selettivi per eliminare il rumore di folding. Il tempo di assestamento rapido è un requisito fondamentale in questa applicazione, perché il tempo di assestamento dell’ADC deve essere in grado di tenere il passo con la rapida commutazione dei canali sul lato di trasmissione.
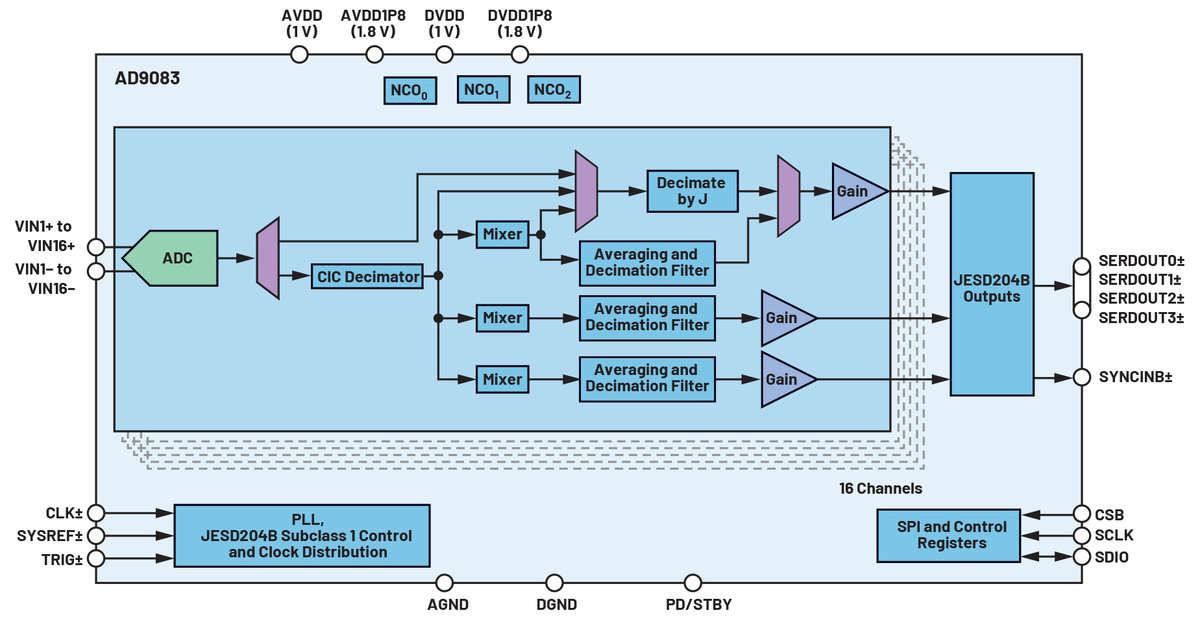
Figura 5. Schema a blocchi dell’AD9083.
Ogni ADC è dotato di un tile di elaborazione del segnale per filtrare il rumore fuori banda modellato dall’ADC sigma-delta e ridurre la frequenza di campionamento. Ogni tile contiene un filtro integratore a pettine (Cascaded Integrator Comb, CIC), un downconverter digitale in quadratura (Digital DownConverter, DDC) con filtri di decimazione multipli a risposta d’ingresso finita (Finite Input Response, FIR) (decimati dal blocco J), oppure fino a tre canali DDC in quadratura con filtri di decimazione a valore medio per applicazioni di data gating. La presenza di tre canali DDC in quadratura consente la demodulazione simultanea di un massimo di tre frequenze. In seguito vedremo come questo possa essere utilizzato per accelerare drasticamente il tempo di scansione.
Configurazione e funzionamento del sistema
Gli ADAR2001 e ADAR2004 sono stati progettati specificamente per un funzionamento efficiente in grandi array. Particolare enfasi è stata posta sulla riduzione degli oneri di cablaggio. Le porte di ingresso RFIN e LO dell’ADAR2001 e dell’ADAR2004 possono funzionare con livelli di ingresso fino a -20 dBm. Poiché è preferibile pilotare questi ingressi da una sorgente LO comune (l’ADF4368 in questo caso), questa bassa sensibilità d’ingresso consente un’ampia diffusione passiva prima che sia necessaria l’amplificazione. Ad esempio, se si ipotizza che uno splitter di potenza Wilkinson abbia una perdita netta di 1 dB, la potenza di uscita di 9 dBm dell’ADF4368 può essere suddivisa passivamente per sette volte e può pilotare 128 dispositivi (512 canali).
Anche i pin “advance” e “reset” che pilotano i sequencer integrati nell’ADAR2001 e nell’ADAR2004 sono progettati per essere controllati in parallelo, in modo da ridurre al minimo il numero di GPIO che il processore o l’FPGA devono fornire. Grazie alla profondità e alla complessità dei sequencer, è possibile pilotare fino a 16 dispositivi ADAR2001 con un’unica serie di impulsi di advance e reset.
I sequencer di ADAR2001 e ADAR2004 devono essere programmati prima del funzionamento. Sebbene sia possibile accedere a tutte le funzionalità di entrambi i dispositivi utilizzando i comandi SPI, la latenza associata comporterebbe un tempo di scansione complessivo eccessivamente lungo.
Consideriamo come configurare un sistema a 64 canali (64 trasmettitori, 64 ricevitori) per una scansione basata sui canali, vale a dire che tutti i canali di trasmissione vengono passati attraverso una singola frequenza prima di incrementarla e ripetere la scansione.
La Figura 6 mostra come vengono programmate le macchine a stati nei 16 dispositivi ADAR2001 per attivare questa scansione. Un obiettivo chiave dell’architettura è la possibilità di sequenziare più dispositivi che fanno cose diverse partendo da linee di controllo comuni.
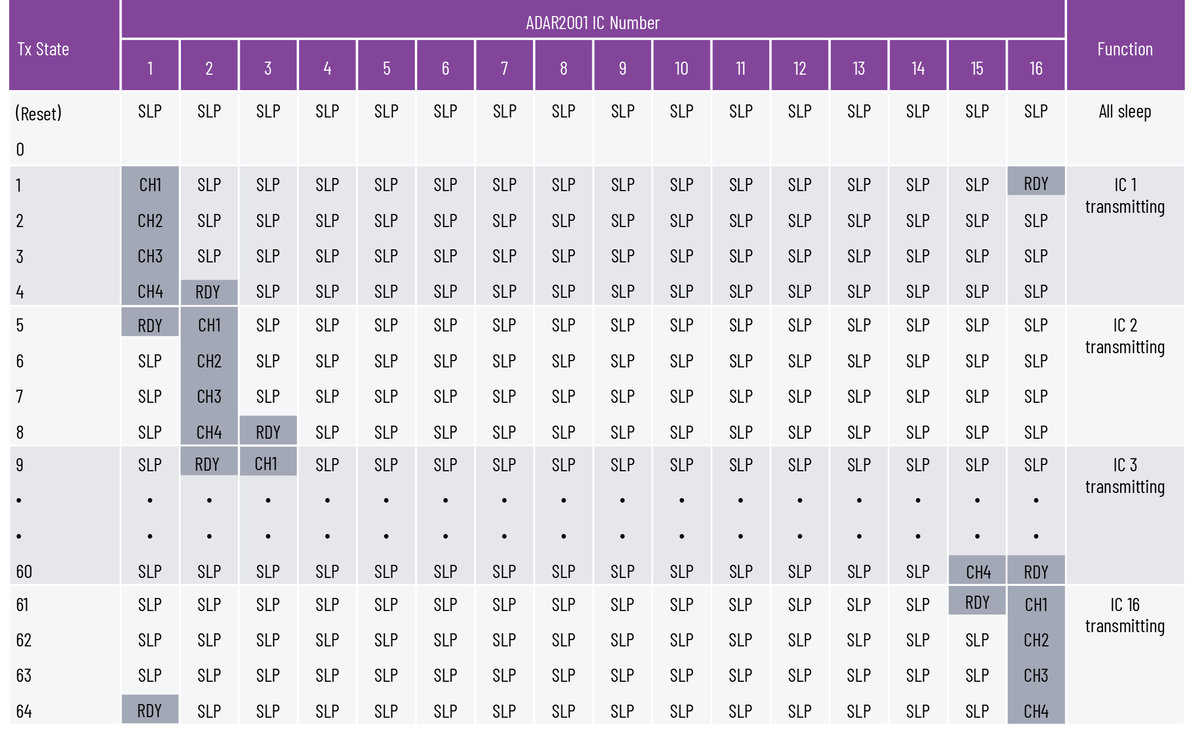
Figura 6. Programmazione di 16 trasmettitori ADAR2001 per uno sweep di canale guidato da un singolo impulso di advance.
Nella Figura 6 si nota che mentre ogni circuito integrato ha 65 stati, la maggior parte dei circuiti integrati è programmata per essere in sleep mode (SLP) per la maggior parte del tempo. Ad esempio, il circuito integrato 1 è pienamente attivo solo per i primi quattro stati, in quanto i canali 1, 2, 3 e 4 di quel circuito integrato trasmettono in sequenza. Durante questi quattro stati, tutti gli altri circuiti integrati sono in modalità SLP o ready (RDY).
Allo stesso modo, il circuito integrato 2 è pienamente attivo solo durante gli stati da 5 a 8, poiché tutti gli altri circuito integrato sono in modalità SLP o RDY. Configurando le 16 macchine a stati in questo modo, con i loro cicli di accensione sfalsati l’uno rispetto all’altro, è possibile pilotare le linee di advance e reset di tutti e 16 i dispositivi con impulsi paralleli.
La modalità RDY è uno stato intermedio, sviluppato per ottimizzare il tempo di switch e risparmiare energia. Poiché la gran parte dei trasmettitori è inattiva per la maggior parte del tempo, la modalità SLP è fondamentale per ridurre il consumo di energia. Tuttavia, il tempo necessario per passare dalla modalità SLP a quella di trasmissione (50 ns) è eccessivo dal punto di vista del sistema e comporterebbe ritardi durante la scansione. La modalità RDY è uno stato intermedio che può essere invocato quando un circuito si prepara a trasmettere. Si noti (Figura 6) che nello Stato 4, il Canale 4 del circuito 1 sta trasmettendo e il circuito 2 sta per essere preparato alla trasmissione ponendolo in modalità RDY. Nella transizione dagli stati 4 e 5 del trasmettitore, il circuito 1 passa dalla modalità di trasmissione alla modalità RDY e il circuito 2 passa dalla modalità RDY a quella di trasmissione. Questa transizione dura 10 ns. Le successive commutazioni di canale sul chip (cioè dal Canale 1 al Canale 2 al Canale 3 al Canale 4 sul circuito 2) hanno un tempo di switch di 2 ns. Per un array di 1024 elementi che spazia da 10 GHz a 40 GHz con incrementi di 0,1 GHz, il tempo di scansione completo sarebbe inferiore a 20 ms. Questo presuppone un tempo di blocco del PLL di 50 μs. Se si utilizzassero due PLL che operano in modalità ping-pong per ottenere un più rapido assestamento della frequenza, il tempo di scansione sarebbe ben inferiore a 5 ms.
Il funzionamento e il sequencer del ricevitore ADAR2004 sono meno complessi, perché è pratica comune configurare tutti i canali del ricevitore in modo che siano sempre in ricezione. Le macchine a stati devono comunque essere sequenziate in modo da scegliere il percorso corretto del moltiplicatore e le impostazioni del filtro mentre il ricevitore esegue lo sweep in tandem con il trasmettitore.
Come già detto in precedenza, ogni canale ADC dell’AD9083 può accedere a un massimo di tre canali DDC in quadratura. Ciò significa che può demodulare simultaneamente tre frequenze, supponendo che tutte e tre queste frequenze rientrino nell’intervallo di frequenza di ingresso della larghezza di banda dell’analog input dell’ADC (125 MHz). Ad esempio, posizionando tre toni IF a 50 MHz, 75 MHz e 100 MHz, tutti e tre possono essere demodulati simultaneamente in dati in banda base I e Q.
Per facilitare questo approccio sul lato trasmissione, è necessario utilizzare tre PLL invece di uno. Le tre frequenze di trasmissione devono sempre essere indirizzate a circuiti trasmittenti fisicamente diversi (i moltiplicatori dell’ADAR2001 non possono condurre segnali multitono). Le tre frequenze devono essere sempre diverse, ma rimanere vicine in frequenza l’una all’altra durante lo sweep. Ad esempio, se un canale su uno dei dispositivi ADAR2001 trasmette a 10 GHz, altri due dispositivi trasmetteranno a 10,025 GHz e 10,050 GHz per supportare le uscite IF a 50 MHz, 75 MHz e 100 MHz. Questo schema richiede più hardware e un’infrastruttura di switching nel percorso di trasmissione, ma ha il vantaggio di ridurre di un fattore 3 il tempo di scansione complessivo.
Conclusione sulle onde millimetriche
Il chipset composto dal trasmettitore quadruplo ADAR2001, dal ricevitore quadruplo ADAR2004, dall’ADC a 16 canali AD9083 e dal PLL/VCO ADF4368 offre l’elevato livello di integrazione e funzionalità necessario per implementare gli scanner di sicurezza mmWave walkthrough di prossima generazione. Le macchine a stati integrate e la downconversion digitale on-chip sgravano in modo significativo l’elaborazione tradizionale centralizzata e la spostano sull’Intelligent Edge. Il risultato netto è che il processore centrale viene coinvolto in misura minore nel controllo del sistema durante la scansione e i dati che riceve sono già demodulati e decimati. Sebbene questo chipset sia stato sviluppato specificamente per le applicazioni di imaging di sicurezza ad onde millimetriche, l’ampia gamma di frequenze del trasmettitore ADAR2001 e del ricevitore ADAR2004, nonché il livello di integrazione dell’ADC a 16 canali AD9083, lo rendono utile anche in altre applicazioni in cui sono richieste un’elevata densità di canali e una commutazione rapida.























 è diventato una parte importante dei sistemi di scansione di sicurezza negli aeroporti, negli edifici pubblici e negli stadi.){kind=link}