

Di David Bartlett, Senior Principal Engineer, Product Center Positioning, u-blox, e la dott.ssa Stefania Sesia, Phd, Head of Application Marketing, Automotive, u-blox
Attualmente sulla stampa mainstream si discute così tanto di veicoli automatizzati, che è facile dimenticare che alcune delle decisive tecnologie di base devono ancora maturare in modo significativo prima che grandi numeri di persone possano essere trasportati da A a B da veicoli a guida autonoma.
Un’area che richiede particolare attenzione è quella del posizionamento ad alta precisione. Affinché i veicoli che si collocano in cima della scala di automazione a sei livelli della Society of Automotive Engineers diventino realtà, devono essere in grado di individuare in qualsiasi momento e in modo affidabile la loro posizione con un’approssimazione di pochi centimetri.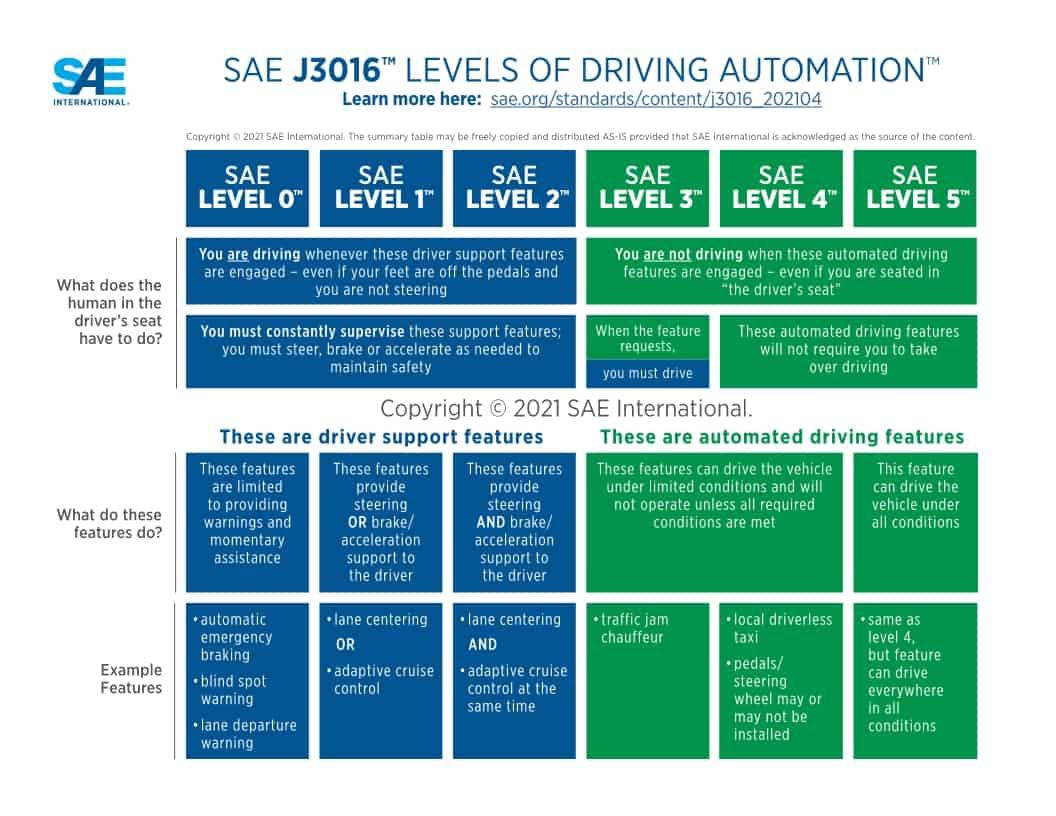
Figura 1: scala di automazione a sei livelli della Society of Automotive Engineers
© SAE Internationa
I sistemi di posizionamento della maggior parte delle auto moderne, che in genere utilizzano ricevitori GNSS (Global Navigation Satellite System – Sistema globale di navigazione satellitare) abbinati a un’unità IMU (Inertial Measurement Unit – Unità di misurazione inerziale) e al contachilometri, non sono in grado di avvicinarsi a questo livello di precisione. Anche nelle condizioni più favorevoli per la ricezione del segnale satellitare GNSS, la precisione è compresa tra 2 e 5 m di CEP orizzontale senza un servizio di correzione. In ambienti più difficili, come le aree urbane o gli ambienti chiusi, questa precisione si riduce notevolmente.
Utilizzo di UWB e V2X per integrare il GNSS
Per ovviare a questa carenza del GNSS si stanno sviluppando varie soluzioni, ma tutte presentano attualmente dei limiti o non offrono una soluzione che funzioni in tutti gli ambienti. I futuri veicoli autonomi dovranno quindi invariabilmente affidarsi a soluzioni ibride che combinano più tecnologie.
Un’area in cui finora sono state condotte relativamente poche ricerche è la combinazione del GNSS con segnali radio terrestri per migliorare la precisione del posizionamento automobilistico. Le tecnologie cellulari vehicle-to-everything (C-V2X), IEEE 802.11p V2X, il suo successore 802.11bd, e la banda ultra larga (UWB – Ultra Wide Band) possono essere utilizzati per misurare lo spazio a breve distanza. La tecnologia di comunicazione V2X ITS è elencata come potenziale soluzione di posizionamento nella norma EN 302890 (Sistemi di trasporto intelligenti), mentre la tecnologia a banda ultra larga (UWB) sta guadagnando terreno per le applicazioni in ambienti interni e per i produttori di veicoli per l’accesso senza chiavi.
Queste tecnologie sono tutte pronte per essere approfondite come complemento del GNSS e delle IMU, per fornire un supporto decisivo ai livelli più elevati di autonomia dei veicoli. u-blox ha recentemente condotto uno studio per valutare i punti di forza e di debolezza del ranging terrestre di IEEE 802.11p V2X e UWB come parte di una soluzione ibrida in combinazione con il GNSS per la navigazione automobilistica. Il nostro obiettivo era quello di stabilire la loro utilizzabilità per questa applicazione e di identificare i punti in cui è necessario effettuare ulteriori ricerche per far sì che questo tipo di soluzione di navigazione ibrida diventi parte dei futuri veicoli autonomi.
Come funziona il ranging terrestre
Un sistema di ranging terrestre richiede una rete di stazioni fisse a terra (tipicamente denominate unità stradali (RSU – Roadside Units) nei sistemi V2X) in posizioni note. I segnali V2X o UWB inviati dal veicolo vengono restituiti dalle RSU, consentendo al veicolo di misurare il tempo di andata e ritorno e, di conseguenza, di calcolare la distanza tra sé e il punto di ancoraggio. Se si esegue questa operazione per tre o più RSU che si trovano in diverse posizioni geometriche rispetto al veicolo, è possibile determinarne la posizione.
La necessità di simulare
L’installazione di massa delle RSU necessarie per questo tipo di soluzione non è ancora avvenuta. L’installazione di una rete adeguata di stazioni di terra in un contesto urbano su suolo pubblico non era fattibile per la nostra ricerca, in parte perché il panorama normativo dell’UWB in questo contesto è ancora in evoluzione. Abbiamo invece installato punti di ancoraggio in varie proprietà private, da campi aperti ad aree rappresentative di ambienti urbani, come, ad esempio, in una zona industriale. Abbiamo effettuato misurazioni approfondite del comportamento dei segnali UWB e V2X in questi ambienti, che ci hanno permesso di estrarre statistiche sulle prestazioni, come il rumore, e di creare successivamente un modello di simulazione comportamentale per le prestazioni di ranging.
La nostra metodologia di test
Dopo aver stabilito il nostro modello di simulazione comportamentale per diversi tipi di ambienti, rurali, urbani e interni, abbiamo effettuato una serie di prove di guida nel mondo reale. Queste coprivano un’ampia gamma di condizioni di guida. Abbiamo affrontato tratti di strada aperta ad alta velocità, aree urbane dense, traffico congestionato con stop and go, molte curve e luoghi con ricezione GNSS limitata o assente, come le gallerie.
Durante questi spostamenti, abbiamo raccolto sia le misure GNSS che i dati di campo (ground truth). Per le prime, abbiamo utilizzato un modulo u-blox NEO-M8L con IMU integrata. Per stabilire i dati di campo, abbiamo utilizzato un ricevitore cinematico in tempo reale (RTK – Real-Time Kinematic) di alto livello, un servizio di ampliamento dati GNSS e una IMU di alta qualità.

Abbiamo classificato ogni sezione delle guide di prova in base all’ambiente, città densa, galleria, aperta campagna e così via, per poter applicare i modelli di rumore appropriati nella nostra simulazione.
Poi abbiamo assegnato le posizioni delle RSU in base alle regole di densità e posizionamento scelte e abbiamo aggiunto 2 m di variazione casuale dell’altezza, per evitare una distribuzione completamente planare. Abbiamo eseguito le prove con diverse quantità di RSU, per capire quante ne sarebbero state necessarie per raggiungere i livelli di precisione necessari.
Abbiamo infine impostato ulteriori variabili del simulatore, come l’accuratezza della marca temporale sulle misurazioni della distanza.
Dopo aver predisposto quanto sopra, abbiamo generato misurazioni di distanza simulate tra le RSU e la posizione nota per ogni periodo di ranging. A queste abbiamo aggiunto del rumore a campione, e abbiamo unito le misurazioni del simulatore contenenti il rumore con le misurazioni GNSS registrate durante il percorso.
I nostri risultati principali
I risultati del simulatore ci hanno permesso di generare statistiche sulle prestazioni che hanno facilitato il confronto tra le soluzioni ibride GNSS+V2X e GNSS+UWB e una soluzione GNSS+IMU convenzionale, simile a quelle attualmente presenti nei veicoli standard.
La Figura 2 mostra le prestazioni delle tre soluzioni:
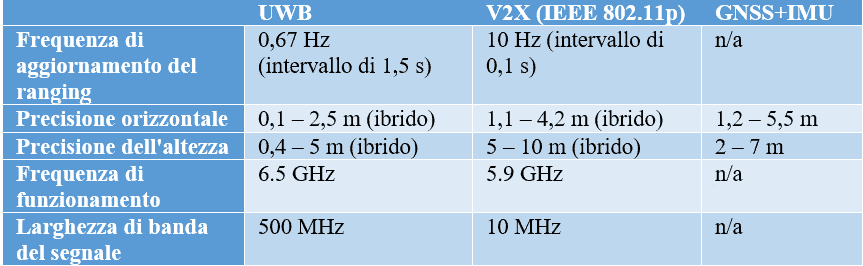
Figura 2: prestazioni delle tre soluzioni di navigazione testate.
A un livello molto alto, abbiamo riscontrato che il sistema GNSS+V2X (IEEE 802.11p) ha ottenuto prestazioni simili a una soluzione GNSS+IMU(DR) convenzionale che utilizza il posizionamento standard. In situazioni in cui non c’è ricezione GNSS o questa è gravemente degradata, anche una IMU perde il suo valore, dato che dipende dalla continua ricezione GNSS per rimanere allineata. In questo caso, una soluzione di posizionamento basata su V2X potrebbe essere utile per la guida della navigazione. Tuttavia, occorrerà approfondire ulteriormente, anche il ruolo dell’IMU nel posizionamento ad alta integrità e precisione, per raggiungere i livelli di accuratezza e integrità richiesti dalle applicazioni autonome.
Il sistema ibrido GNSS+UWB ha fornito prestazioni nettamente migliori, avvicinandosi ai livelli ottenibili con un servizio di ampliamento GNSS basato su RTK. Il nostro sistema di prova ha lavorato a 0,67 Hz ed è stato in grado di fornire una precisione vicina ai 10 cm, anche se ci aspettiamo che i futuri sistemi di produzione si allineino alla più comune frequenza di aggiornamento di 10 Hz, ampiamente utilizzata nel V2X.
Accoppiando un sistema di ranging UWB a 10 Hz con un sistema GNSS ad alta precisione che utilizza dati di correzione, dovrebbe essere possibile ottenere una precisione di 10 cm nella maggior parte delle situazioni. È già stato dimostrato che il GNSS con dati di correzione è in grado di fornire questo livello di precisione in aree aperte e autostrade. Una rete di RSU distribuita in ambienti urbani consentirebbe all’UWB di integrare il GNSS ad alta precisione in situazioni in cui la ricezione satellitare è difficile.
Tuttavia, il raggio d’azione limitato dell’UWB e le attuali restrizioni normative sull’uso all’aperto ne limitano, al momento, l’utilità. Detto questo, la micro-navigazione in aree interne, come i parcheggi, potrebbe essere un’ottima applicazione per questa tecnologia.
Altri risultati emersi
La ricerca ha portato alla luce una serie di altri importanti risultati. In primo luogo, avere anche solo due RSU visibili, oltre al GNSS, ha fornito un vantaggio significativo nella soluzione ibrida.
In secondo luogo, la variazione di altezza delle RSU è essenziale se il sistema di navigazione deve determinare con precisione l’altezza del veicolo, in particolare con la tecnologia V2X. Ciò sarà particolarmente importante quando si tratterà di consentire ai veicoli di muoversi in sicurezza in presenza di diversi livelli di strada, come. ad esempio. negli incroci a più livelli.
In terzo luogo, siamo riusciti a costruire un filtro ibrido per elaborare i segnali dei sistemi V2X, UWB e GNSS e gestire senza problemi la transizione tra aree con solo GNSS (in cui non sono state distribuite RSU) e aree con solo ranging terrestre (come le gallerie).
In quarto luogo, nonostante si presentasse come grande promessa per questa applicazione, il ranging terrestre è tutt’altro che immune dagli effetti ambientali e dal multipath. Anche l’UWB a volte soffre di una propagazione del segnale non in linea di vista.
Infine, anche l’accurato allineamento temporale tra le misurazioni GNSS e quelle del ranging terrestre si è rivelato un fattore critico. Se inizialmente avevamo previsto che l’allineamento entro pochi millisecondi sarebbe stato sufficiente, in realtà abbiamo scoperto che dovevamo essere al di sotto dei 100 microsecondi.
Come si continua?
Questa ricerca ha dimostrato il potenziale dell’utilizzo del radio ranging terrestre per integrare le tecnologie e i servizi di posizionamento esistenti e attualmente a bordo dei veicoli. Detto questo, è necessario fare di più, non da ultimo sul fronte normativo, affinché questa tecnologia diventi davvero uno dei fattori che rendano possibile l’uso in strada dei futuri veicoli autonomi. Per esempio, è necessario che l’uso dell’UWB all’aperto sia consentito per questa applicazione e che vi sia un’ampia diffusione di RSU con capacità UWB. Inoltre, quando si distribuiscono RSU di qualsiasi tipo, occorre pensare al loro possibile utilizzo come ancore di posizionamento, piuttosto che come semplici dispositivi di comunicazione. Inoltre, è necessario assegnare più spettro e canali più ampi al V2X. Infine, è necessario che le primitive e i segnali di posizionamento siano incorporati negli standard V2X.
Un’area correlata che merita di essere approfondita è l’uso del ranging con la banda UWB per proteggere gli utenti vulnerabili della strada (VRU – Vulnerable Road Users), come i pedoni, i ciclisti e chi si sposta su monopattino. Con gli smartphone e le auto moderne che ambedue includono la tecnologia UWB, esiste è la possibilità di utilizzarla per fare rilevare meglio ai veicoli autonomi la posizione dei VRU nell’ambiente circostante.
Per informazioni clicca qui
Se desiderate saperne di più sulla ricerca, sulla metodologia o sui risultati, u-blox è lieta di parlarne con voi. Scrivete a David.Bartlett@u-blox.com per mettervi in contatto.























{kind=link}